EN
EN
 AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 IW
IW
 LV
LV
 SR
SR
 SK
SK
 UK
UK
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 GA
GA
 CY
CY
 EU
EU
 BN
BN
 BS
BS
 LA
LA
 NE
NE
 SO
SO
 KK
KK


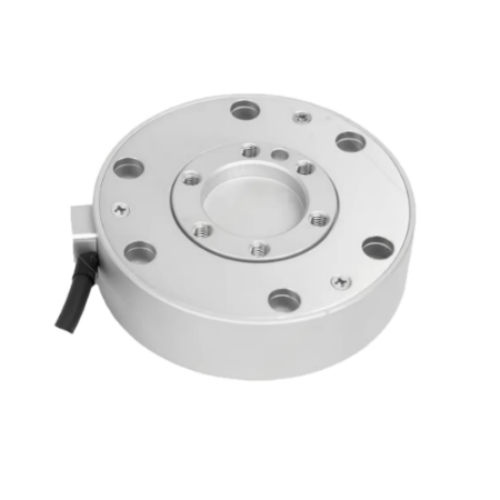
Boîtier personnalisé usiné CNC pour capteur de force au poignet de robot, forme ronde
Cette articulation de poignet usinée avec précision par CNC est conçue pour les robots industriels exigeants. Nous la réalisons dans des alliages à haute résistance selon votre cahier des charges exact, garantissant un mouvement fiable et fluide dans les applications d’automatisation. Idéale pour les intégrateurs et les fabricants nécessitant des composants personnalisés haute performance.
- Vue d'ensemble
- Demande de renseignements
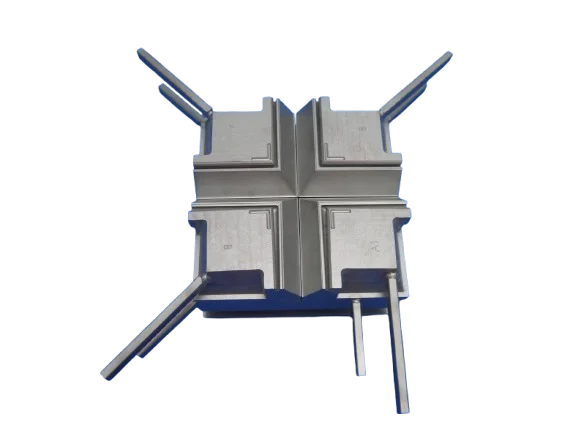
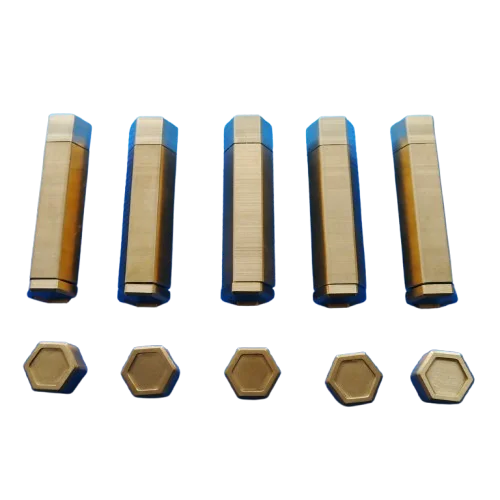
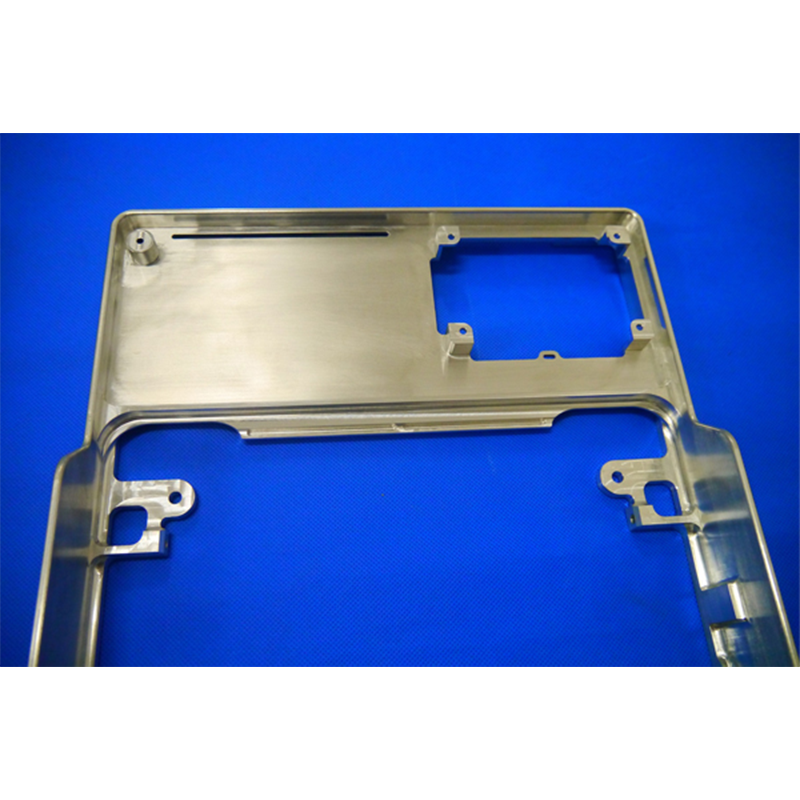
- Produits associés
- Matériau : alliage d'aluminium à haute résistance (par exemple, 6061-T6 ou 7075).
- Processus : Usinage CNC 5 axes.
- Avantage principal : rigidité exceptionnelle combinée à des géométries optimisées et allégées.
- Précision : une précision au niveau du micron garantit la perfection dimensionnelle et la stabilité de la détection.
- Tolérance: ±0,02 mm (réglable selon les besoins).
- Finition de surface : rugosité de 0,8 à 1,6 Ra, avec options d’anodisation ou de sablage.
- Délai pour prototype : 5 à 10 jours ouvrables.
- Délai de production en série : 3 à 4 semaines.
- Résultat : offre des solutions fiables et sensibles de détection de force pour les robots haute précision, améliorant ainsi la justesse du contrôle et la sécurité opérationnelle.
Procédé de fabrication :
Les boîtiers de nos capteurs de force pour poignet de robot sont définis par usinage CNC de précision :